

{kind=link}
{kind=link}
I am very excited to have created a robot from scratch. It took a lot of research to figure out how I wanted to build the robot. In the end, I followed an article in Servo magazine that walked me through it. Like most things in life, it didn't go quite as I planned. I didn't have all the parts that the article required, so a lot of them I found at Ace Hardware and later found out that Fry's Electronics had cheaper screws when I bot some other stuff there. If you have a Fry's electronics where you live, you can start there. Some Radio Shacks are supposed to have some of this stuff, but most requires it be ordered online and shipped to your home or Radio Shack for pickup. There are lots of Robot companies online. I personally like RobotShop since it has such a wide variety of things and they at least have a branch in the US even though they are a Canadian company.
The cost was about $100, but I didn't end up using everything, so like the article said, it is probably pretty close to $85. If you want professional results or just want to save a ton of time fabricating the deck, connecting wheels, making servo mounts, etc I highly suggest buying them. The cost was actually only around $15, but I wanted to see what I could come up with.
I made my deck out of nylon cutting board. It is very strong and durable and doesn't split at all (from what I can tell). The downside is that it is not as easy to work with as I had hoped. For instance, I used my Jigsaw/Scrollsaw, etc to cut it and found that even on the lowest speed it just melted the nylon and made a mess and was hard to cut. By the end, I figured out that if I just tap the trigger and then push the saw through until the blade stopped this was slow enough and kept everything cool enough that it was fairly accurrate to cut with and was managable. If I had to do it again, I probably would not use this material again, but it was free since it was an old cutting board. I did sand it down to make it smooth since there were so many knife marks on it.
The cutting board was a bit thicker than the original design called for and the wheels that I chose were smaller that suggested I ended up changing the original design from a two decker to a one deck robot for now. This actually worked to my favor. Now, I was able to mount the servos and the batteries on the underside of the deck and still had all the room on the top side of the deck. So really I have the same amount of deck space, but with half the height and much less weight. I like my design actually.
I chose the Arduino Uno as the brain for controlling everything. Mostly because it is open source and open hardware and it is WAY cheaper than the Parallax Stamp Kits. Personally, I don't like VB or anything that looks like VB and that is what the Stamp uses. Unless you want to pay even more the Javaline I think it is called. That is just way too expensive for me just to not write in VB like language when I have a much cheaper (and significantly more power) processor (Arduno Uno). My goal was to build a robot under $100 and I succeeded. Granted it doesn't do much because it doesn't have any sensors. I'll add those later at additional cost obviously, but they will come in time as they are needed.
As word about Parallax and the BeoBot. If you don't want to work really hard and do this all from scratch and you want support and supported enhancements, I think the BeoBot would be great. I also think the Lego Mindstorm is a bit more pricey, but you can do so much in a short amount of time with it. If I didn't have such a strong desire to build this robot from scratch just to say that I did it all, you may want to seriously consider one of those other options. The lego solution is great because there are parts readily available and you can create so many different kinds of robots in little time.
Don't underestimate the time it takes to fabricate everything. Designing a robot from scatch takes a lot of time. You have to think about how wires will be run, line up holes on parts, match nuts and bolts, solder, and in general just spend time though trial and error. Don't forget the error part is great for learning, but takes time.
I soldered the battery connectors and barrel connector for powering the Arduino. This was time consuming. I did remember how to solder thankfully. I also figured out to de-solder because I had the polarity of the barrel connector backwards. I don't know how I did that. I did figure out that the barrel connector needs the positive on the inside part and negative on the outside part. Even with that knowledge, I got confused. Oops. Oh well, in the end it gave me a chance to add more length to the plug since the first one was a bit short. Good luck de-soldering the wires from the barrel connector if you wrap them around the posts before you solder them. They will never come off without a LOT of work, though I did finally get the wires off and new ones put on.
When cutting the servo brackets they need to fit snuggly around the servo. This is because the mounting brackets on the servos are right there close to the sides of the servos. If you leave too much space around the servo the screws that go in the mounting brackets won't have anything to screw into. This kind of defeats the purpose of the servo brackets.
I did and you probably will also need to have two sets of power supplies. One for the Arduino and one for the servos. The reason is that the Arduino can only handle so many things plugged into it. This is especially true when it comes to the Servoes. Besides, it is good design to have separate drive system power. That way there isn't noise (electrical noise) that can make your Arduino and you cicuits act funny. Don't worry, it is actually very easy. All you do is connect the grounds together and they work great.
Once BrentBot started to work, I quickly found out I will need at least one swithc for the power. I don't have one right now and everytime I want to test anything, I have to disconnect the main barrel connector, and plug in the usb cable. Not to mention, I usually have to disconnect the batteries for the drive system. While not a pain, these plugs will eventually wear out and they are not really cheap to replace. A switch is a much better solution and allows for faster test cycles.
Servos are great for a simple light weight robot that is under say 3 pounds. Over that, you'll have to get the large servos or go to a motor and gearbox. In either case, always get wheels that mount directly on the servo's shaft. If you don't, you will be spending lots of time trying to figure out how to mount a wheel onto it like I did. In the end, I think it is quite straight.
When you are writing your code to control the servos there is a library to do so. This doesn't mean you have nothing to do. You still have to write your basic functions like forward, reverse, turn left, turn right. If you don't attach and the detach for each of these functions your servos may jitter when they are idle. To prevent the jitters all just make sure you detach after each function call. This has the added benefit of saving your battery life also.
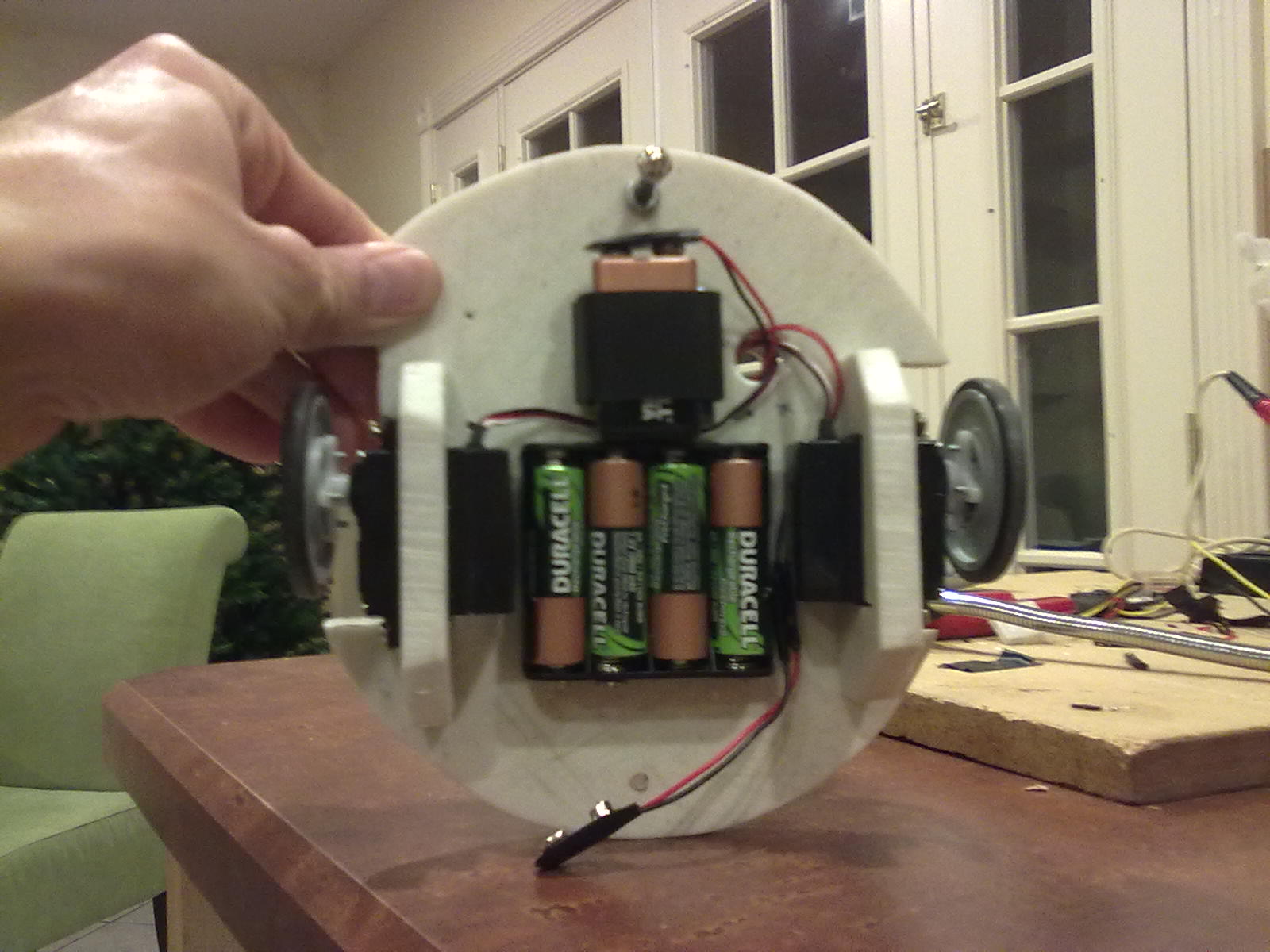
The power for the Arduino is a single 9V battery. The drive system is powered by 4 rechargeable AA batteries. I highly recommend rechareable batteries. Otherwise, you will be spending a lot on batteries. They don't really last long.
By all means, unless you have servos already, be sure to by the continuous rotation versions. They are the same price and will save you from trying to figure out how to take one apart and modifying it. If you need to modify it, there are article on the internet that tell you how to do it. I didn't want to bother with it. It seems silly these days when continuous ones are readily available at the same cost.
I found that having old computer plugs, wires, etc came in handy. If you have the long header pins they fit the computer plugs perfectly because a computer is a circuit after all. I also found the wire useful for the power lines since they are pretty thin. Yes, I know you can buy wire, but it usually isn't two wires side by side which creates less mess, and in my case I had them already so they were free to me. If you don't have them, consider an old computer from a garage sale that would have stuff you can use. Goodwill is another option that can be fairly inexpensive. On the other hand, unless you find just a screaming deal, you are probably better off just buying wire and taping them together, or using zip-ties.
It is important that you get your polarities correct. This is particular important with your servo. if you get this wrong, you can permanently damage your servo. I think the Arduino can cope even if the polarity is reversed, but I don't really recommend it. The easy way to do this is with a battery tester or better yet a multi-meter. To see which wire is the positive one, you touch the wire to the red lead of the meter, and the other wire to the black lead of the meter. If you get a positive voltage (or if the battery tester says good) then the wire on the red lead is your positive wire. If you get a negative voltage or no ready on the battery tester then the wire on the red lead is negative. In general it is a good idea to start at a larger range on your multi-meter. Says something like 20, but starting at 2 should be good also since we are talking about small voltages here and it is know to be say 9Volts for a 9Volt battery.
I hope this is useful to someone that is starting with robotics.
No comments:
Post a Comment